|
|
My robots
I have always been fascinated with robots.
As a kid, I always wanted to have a robot, and the main reason for wanting a computer was that I knew it could be a robot's
brain. Things didn't work out quite as I expected - instead, my "robot's brain" was mostly used to play
River Raid and Bruce Lee. Anyways, years later, I stared playing with robots. Most of my efforts were never documented in any presentable form, so
there is not much I can show here. Fortunately, a few of my projects left some track in the form of block schemes and videos
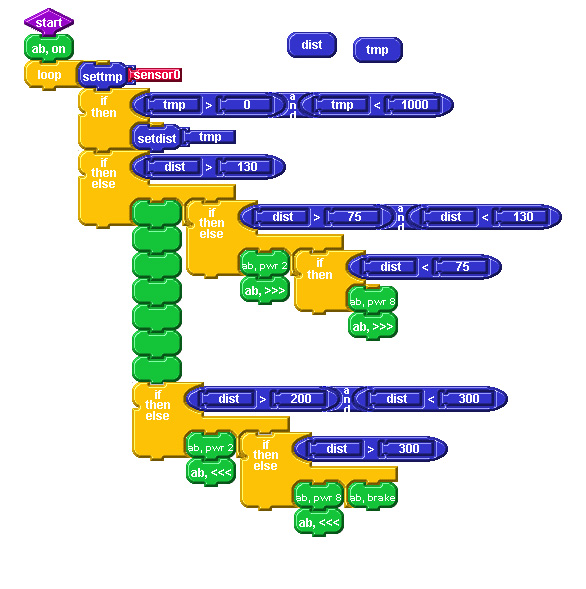
on YouTube. I will share these projects with you here. Robot I - Avoiding obstacles One of the very basic abilities that any robot needs is some form of obstacles
avoidance. You don't want your robot to hit everything on it's way, and you also don't want it to just stay there
when some moving object is going to crash it. So you basically have to equip your robot with distance detectors, and teach
it to react to any objects that it finds in a close proximity. In my design, the robot will move fast forward if there are
no obstacles on its way. If something is detected, it will slow down and move closer to the object, where it will stop. If
the object will start moving in robot's direction, the robot will start moving backwards to avoid an accident.
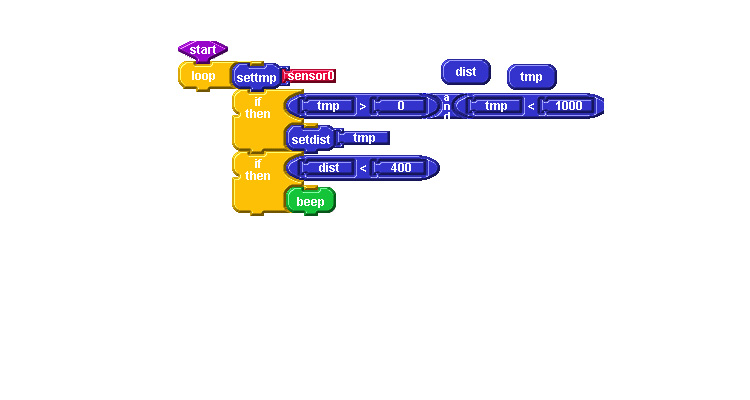
Robot II -
Altitude detection It is very useful to have a way to stop your robot when it goes bad. In situations like this, I like to be able to completely stop my robot simply by lifting it up. So I installed proximity
sensor on the bottom of my robot and wrote a simple procedure to detect when it is lifted. This will cause the robot to immediately
stop whatever it is doing (and beep).
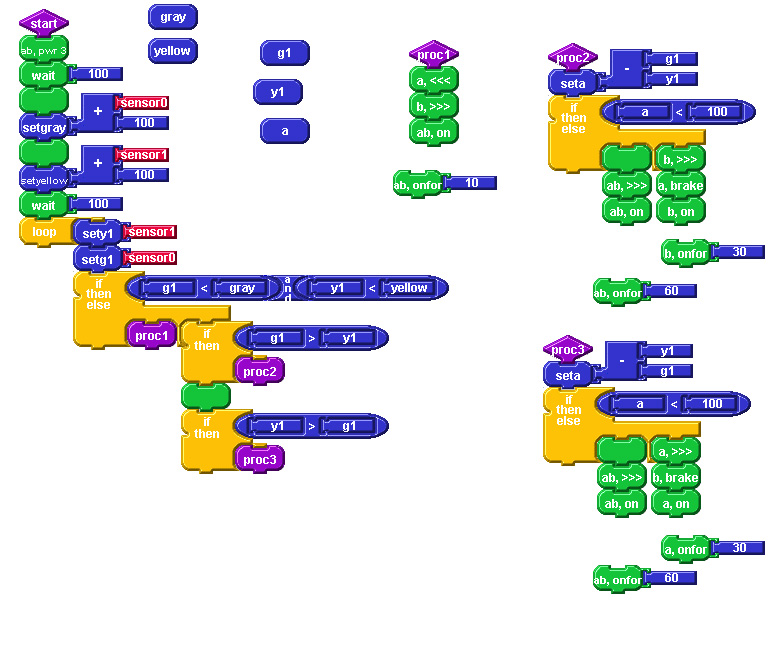
Robot III - Follow the light One of the very basic
things you can do with your robot is to teach it how to follow a light source. Two simple light sensors is all you need to
equip your robot with a nice pair of eyes. By measuring the difference in light brightness between the two
sensor, your robot can figure out where the source of light is, and can start moving in the right direction.
Robot IV - Follow the line Probably the most popular type of robot
competition is among line following robots. The idea is simple: draw a line on the floor and your robot should follow it as fast and as accurate as possible.
I created two designs to accomplish this (unfortunately, I can't find block scheme for the second, improved one). They
are both still pretty slow, but it's just a start. I will work on a better one in the future. 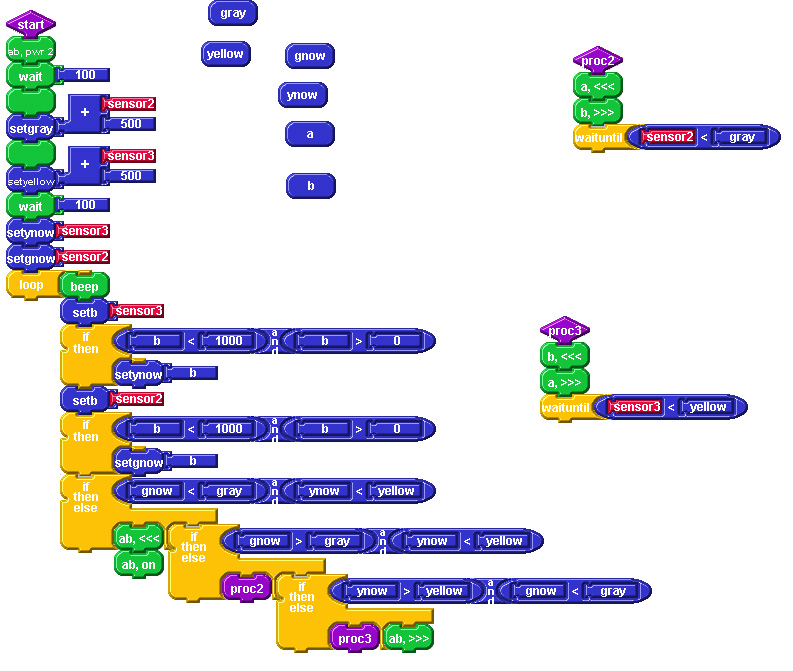 Follow the Line - V1.0 Follow the light V1.1 - much faster and accurate |